The method, which may be useful in determining coordinate systems for a mooring array or a ship transects, calculates (x,y) from distance calculations along geodesic curves. See “Caution”.
Usage
geodXy(
longitude,
latitude,
longitudeRef,
latitudeRef,
debug = getOption("oceDebug")
)Arguments
- longitude, latitude
vector of longitude and latitude
- longitudeRef, latitudeRef
numeric reference location. Poor results will be returned if these values are not close to the locations described by
longitudeandlatitude. A sensible approach might be to setlongitudeReftolongitude[1], etc.- debug
an integer specifying whether debugging information is to be printed during the processing. This is a general parameter that is used by many
ocefunctions. Generally, settingdebug=0turns off the printing, while higher values suggest that more information be printed. If one function calls another, it usually reduces the value ofdebugfirst, so that a user can often obtain deeper debugging by specifying higherdebugvalues.
Details
The calculation is as follows.
Consider the i-th point in the longitude and latitude
vectors. To calculate x[i], geodDist() is
used is to find the distance
along a geodesic curve connecting (longitude[i], latitude[i]) with
(longitudeRef, latitude[i]). The resultant distance
is multiplied by -1 if longitude[i]-longitudeRef is negative,
and the result is assigned to x[i].
A similar procedure is used for y[i].
Caution
This scheme is without known precedent in the literature, and users should read the documentation carefully before deciding to use it.
Change history
On 2015-11-02, the names of the arguments were changed from lon, etc., to
longitude, etc., to be in keeping with other oce functions.
On 2017-04-05, four changes were made.
Default values of
longitudeRefandlatitudeRefwere removed, since the old defaults were inappropriate to most work.The argument called
rotatewas eliminated, because it only made sense if the mean resultant x and y were zero.The example was made more useful.
Pointers were made to
lonlat2utm(), which may be more useful.
See also
Other functions relating to geodesy:
geodDist(),
geodGc(),
geodXyInverse()
Examples
# \donttest{
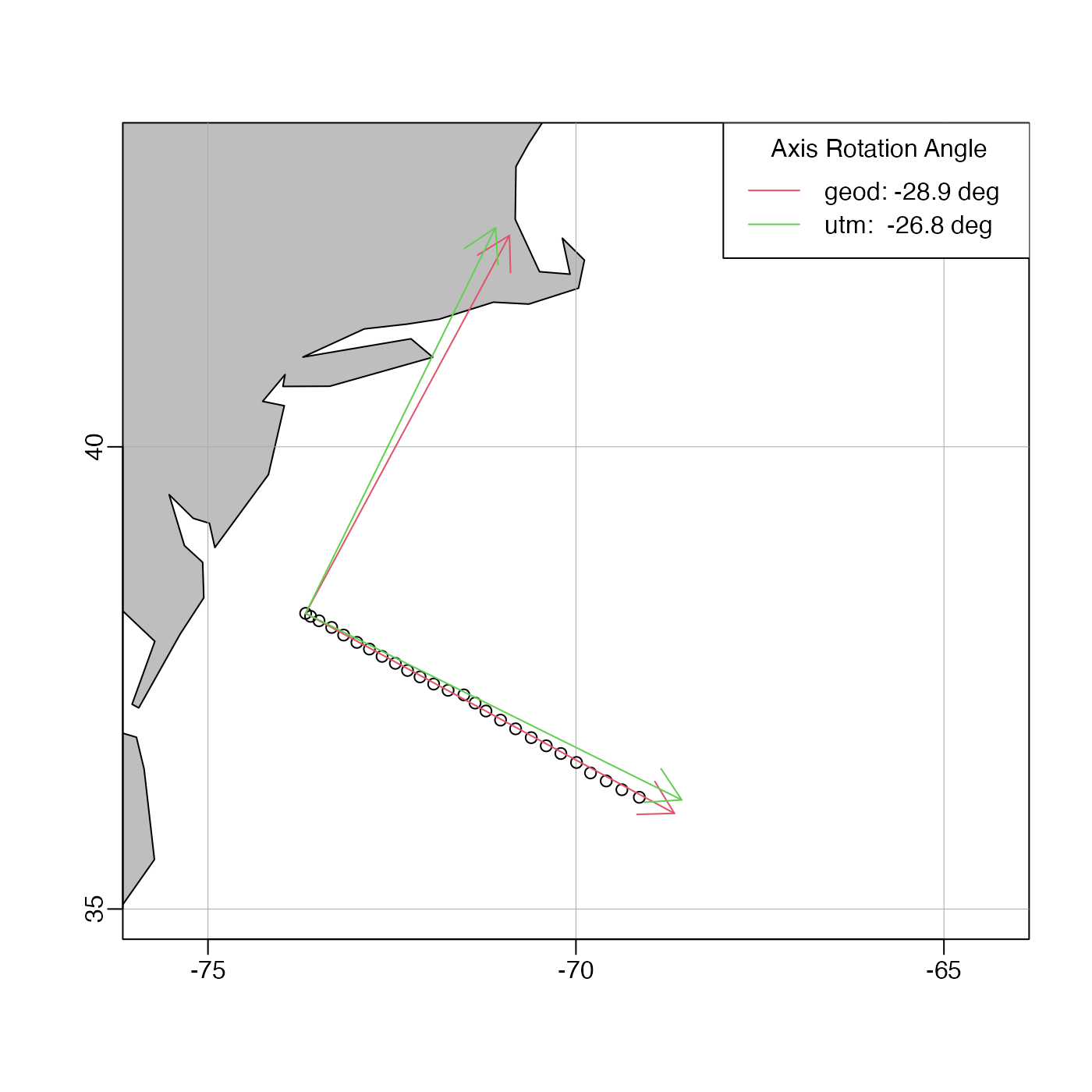
# Develop a transect-based axis system for final data(section) stations
library(oce)
data(section)
lon <- tail(section[["longitude", "byStation"]], 26)
lat <- tail(section[["latitude", "byStation"]], 26)
lonR <- tail(lon, 1)
latR <- tail(lat, 1)
data(coastlineWorld)
mapPlot(coastlineWorld,
projection = "+proj=merc",
longitudelim = c(-75, -65), latitudelim = c(35, 43), col = "gray"
)
mapPoints(lon, lat)
XY <- geodXy(lon, lat, mean(lon), mean(lat))
angle <- 180 / pi * atan(coef(lm(y ~ x, data = XY))[2])
mapCoordinateSystem(lonR, latR, 500, angle, col = 2)
# Compare UTM calculation
UTM <- lonlat2utm(lon, lat, zone = 18) # we need to set the zone for this task!
angleUTM <- 180 / pi * atan(coef(lm(northing ~ easting, data = UTM))[2])
mapCoordinateSystem(lonR, latR, 500, angleUTM, col = 3)
legend("topright",
lwd = 1, col = 2:3, bg = "white", title = "Axis Rotation Angle",
legend = c(
sprintf("geod: %.1f deg", angle),
sprintf("utm: %.1f deg", angleUTM)
)
)
 # }
# }