This function provides names for the numerical navState codes
used by various gliders, with the aim of making it easier to
write self-explanatory code (see “Examples”).
Arguments
- g
Either a character string or glider object. If it is a string, then it is the type of glider, which in the present version of the function must be
"seaexplorer". If it is a glider object, then the value ofnavStateCodesin themetadataslot of that object is returned, if that exists, or else thetypeitem in themetadataslot is used to determine the type, as in the case withgbeing a character string.
Value
A list of integers defining the navigation state, each given a brief name as indicated in the “Details” section.
Details
The numerical values for seaexplorer are as follows.
| Name | Value | Description |
not_navigating | 105 | glider is being set up |
surfacing | 115 | nearing the surface |
at_surface | 116 | at the surface, acquiring GPS and transmitting data |
inflecting_downwards | 110 | ballast being adjusted to cause descent |
descending | 100 | ballast causing descent |
inflecting_upwards | 118 | ballast being adjusted to cause ascent |
ascending | 117 | ballast causing ascent |
Note that the downward portions of profiles are roughly signalled by several
inflecting_downwards codes followed by descending
codes, while the upward portions have inflecting_upwards codes
The numerical values for type slocum are as follows. (These
are(defined as m_depth_state in the slocum documentation;
see pages 1-24 of reference 1.)
| Name | Value | Description |
ignore | 99 | - |
hover | 3 | - |
climbing | 2 | - |
diving | 1 | - |
surface | 0 | - |
none | -1 | - |
References
1.Teledyne Webb Research. Slocum G2 Glider Operators Manual, January 2012. https://gliderfs2.coas.oregonstate.edu/gliderweb/docs/slocum_manuals/Slocum_G2_Glider_Operators_Manual.pdf.
Examples
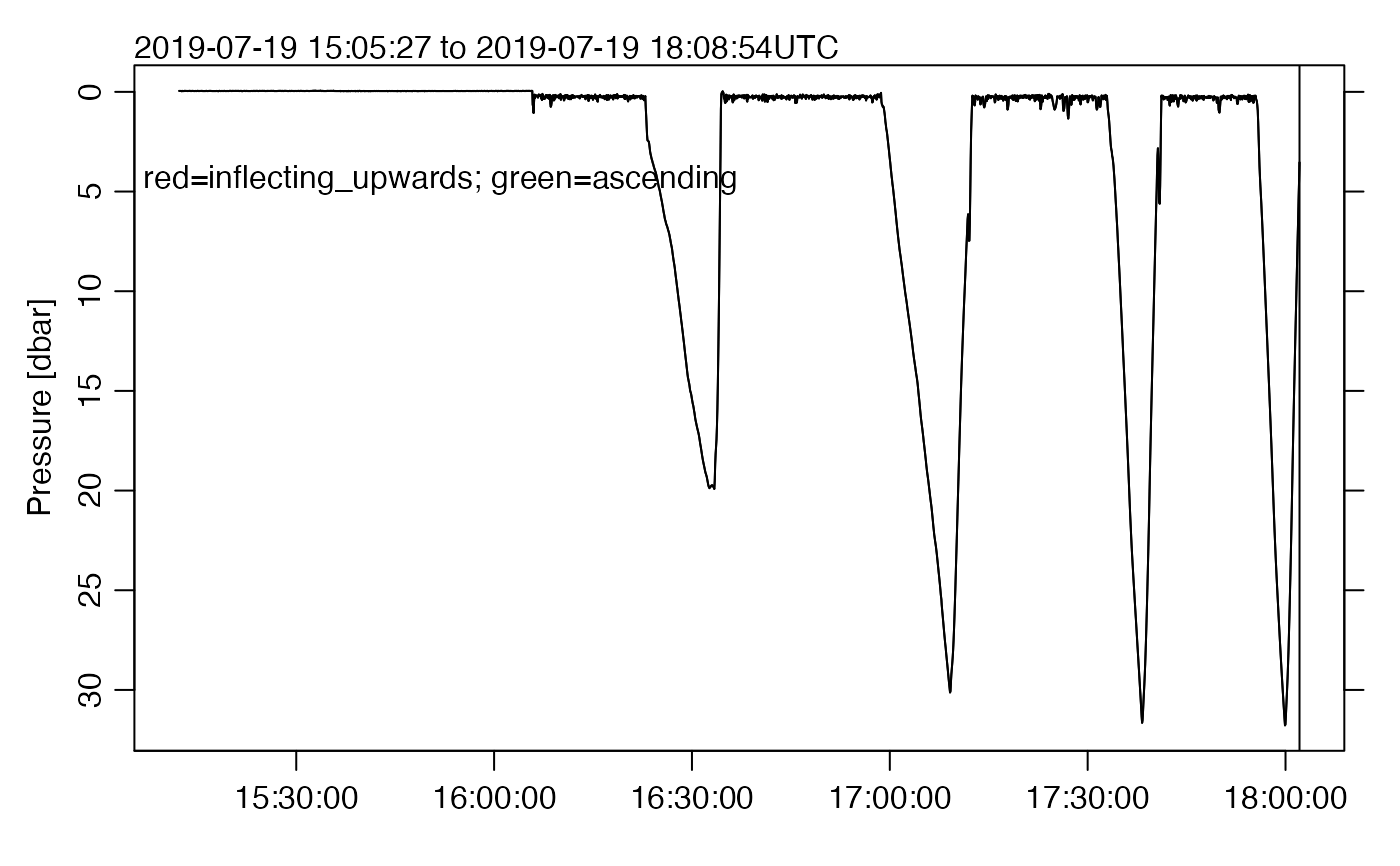
# Use codes to identify upcasts, at least roughly (note the stray points)
directory <- system.file("extdata/sea_explorer/delayed_raw", package = "oceglider")
g <- read.glider.seaexplorer.raw(directory, "pld1.raw", progressBar = FALSE)
ns <- navStateCodes(g)
plot(g, which = "p")
gd <- subset(g, navState == ns$descending)
#> Error in eval(substitute(subset), x@data, parent.frame()): object 'ns' not found
points(gd[["time"]], gd[["pressure"]], col = 2)
#> Error: object 'gd' not found
ga <- subset(g, navState == ns$asscending)
#> Error in eval(substitute(subset), x@data, parent.frame()): object 'ns' not found
points(ga[["time"]], ga[["pressure"]], col = 3)
#> Error: object 'ga' not found
mtext(" red=descending; green=ascending", side = 3, line = -1)